Konvexe und konkave Funktionen
In der Analysis heißt eine Funktion von einem Intervall (oder allgemeiner einer konvexen Teilmenge eines reellen Vektorraums) nach konvex, wenn für alle aus (bzw. aus ) und zwischen 0 und 1 gilt:
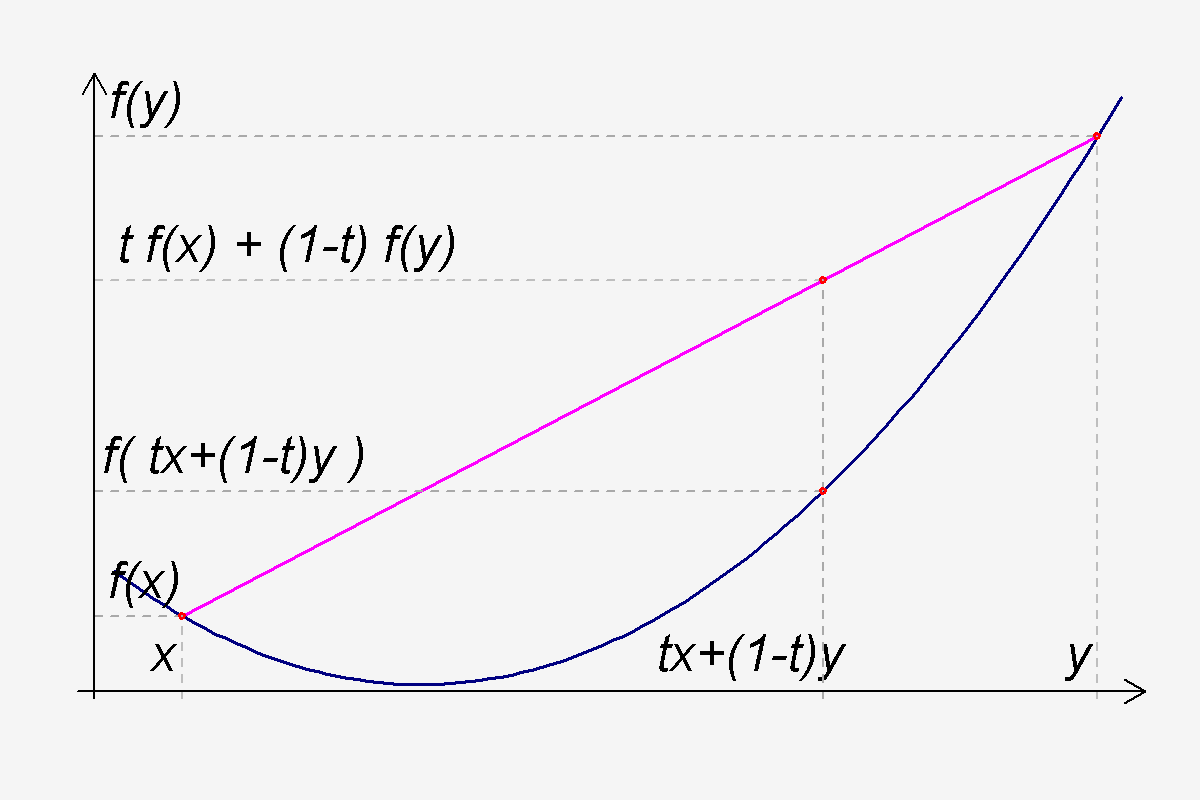
Anschaulich bedeutet die Definition: Die Funktionswerte zwischen zwei Werten liegen unterhalb der Verbindungsgeraden der beiden Funktionswerte an und .
Gilt des Ungleichheitszeichen in die umgekehrte Richtung, also
für alle aus und zwischen 0 und 1 gilt, so wird die Funktion als konkav bezeichnet. Vereinzelt wird der hier verwendete Begriff "konvex" als "konvex von unten" und im Gegensatz dazu "konkav" als "konvex von oben" bezeichnet.
- .
- .
Die besondere Bedeutung konvexer bzw. konkaver Funktionen liegt darin, dass sie allgemeiner als lineare Funktionen sind, aber einfach zu untersuchende Eigenschaften haben, die viele Aussagen über nichtlineare Systeme, insbesondere über nichtlineare Optimierungsprobleme ermöglichen.
Beispiele
Normalparabel ist konvex
- Die Funktion = ist auf ganz streng konvex, denn ' = 2 ist streng monoton wachsend.
- Die Funktion = - ist auf ganz streng konkav, denn ' = -2 ist steng monoton fallend.
- Die Wurzelfunktion ist streng konkav auf dem Intervall [0, ) der nichtnegativen reellen Zahlen.
- Die Exponentialfunktion ist streng konvex auf ganz .
- Die Logarithmusfunktion ist streng konkav auf dem Intervall (0, ) für eine Basis größer als 1 und streng konvex auf dem Intervall (0, ) für eine Basis kleiner als 1.
- Die Betragsfunktion = || ist auf ganz konvex, aber nicht streng konvex.
- Die negative Betragsfunktion = -|| ist auf ganz konkav, aber nicht streng konkav.
- Die Funktion = ist konkav für 0 und konvex für 0.
- Die Funktion = 1/ ist streng konvex auf dem Intervall (0, ) der positiven reellen Zahlen und streng konkav auf dem Intervall (-, 0) der negativen reellen Zahlen.
Konvexität, Beschränktheit und Stetigkeit
Schwächere Definition der Konvexität
Setzt man Stetigkeit voraus, so reicht für Konvexität in einer konvexen Teilmenge eines reellen topologischen Vektorraums bereits die Bedingung, dass ein beliebiges, aber fixes mit existiert, sodass für alle aus gilt:
- .
definiert ist.
Seien nun . Dann gilt auch , denn
- .
Sein nun eine beliebige reelle Zahl mit . Dann lässt sich eine Intervallschachtelung mit konstruieren, die gegen konvergiert: Sei und und mit .
Sei .
Ist , so setzt man und es gilt .
Ist , so setzt man und es gilt .
sind ebenfalls aus , es gilt und .
Die so konstruierte Intervallschachtelung konvergiert also gegen ; wegen der Stetigkeit von gilt daher . Da beliebig gewählt war, folgt also und ist konvex.
Gegenbeispiel ohne Stetigkeit
Dass Stetigkeit für die schwächere Definition wirklich benötigt wird, lässt sich mit folgendem Gegenbeispiel zeigen: Ist eine Hamelbasis des Vektorraums der reellen Zahlen über dem Körper der rationalen Zahlen, also eine über den rationalen Zahlen linear unabhängige Menge reeller Zahlen, in der jede reelle Zahl eine Darstellung der Art mit nur endlich vielen rationalen hat, so erfüllt bei beliebiger Wahl von die Funktion zwar ist aber nicht notwendigerweise konvex.
Beschränktheit und Konvexität
für alle aus einer konvexen Teilmenge eines normierten Vektorraums gilt, noch voraus, dass nach oben beschränkt ist, so folgt daraus bereits die Stetigkeit von in den inneren Punkten von . Anschaulich wird dies daraus klar, dass man an einer Unstetigkeitsstelle eine beliebig steile Verbindungsgerade zwischen zwei Funktionswerten ziehen kann, wobei die Funktion zwischen den beiden Werten unterhalb der Verbindungsgeraden und außerhalb der beiden Werte oberhalb der Verbindungsgerade liegen muss. Kann die Verbindungsgerade nun beliebig steil werden, so stößt man irgendwann über die obere Schranke der Funktion.
Formal ist der Beweis allerdings etwas komplizierter. Zunächst beachte man, dass aus den obigen Voraussetzungen für natürliche Zahlen und
folgt, dass
bzw.
- .
eine zur Gänze in enthaltene offene Kugel um . Wäre nun nicht stetig in , so gäbe es ein sodass für jedes ein existiert, sodass zwar aber . Sein nun so gewählt, dass
- ,
aber
- .
Angenommen, . Dann gilt für
- .
Das kann aber nicht sein, da . Daher liegt in und es muss gelten.
Sei daher . Dann gilt für
- .
Das kann aber auch nicht sein, da . Daher liegt auch in und es muss ebenfalls gelten.
Die Aussage, dass eine konvexe beschränkte Funktion stetig in den inneren Punkten ist, ist auch bedeutsam für das Lösen der Cauchyschen Funktionalgleichung
- .
Aus dieser Aussage folgt nämlich, dass diese Funktionalgleichung eine eindeutige Lösung hat, wenn zusätzlich gefordert wird, dass beschränkt ist.
Unendlichdimensionaler Fall
Im unendlichdimensionalen Fall brauchen konvexe Funktionen nicht stetig zu sein, da es lineare (also somit auch konvexe) Funktionale gibt, die nicht stetig sind. Allerdings gilt, dass beschränkte konvexe Funktionale eines normierten Vektorraums stetig sind.
Endlichdimensionaler Fall
Innere Punkte
Konvexe Funktionen einer konvexen Teilmenge C des endlichdimensionalen reellen Vektorraums sind stetig in den inneren Punkten. Um das zu sehen, betrachte man einen inneren Punkt . Für diesen existiert ein Simplex mit den Eckpunkten , der wieder als inneren Punkt enthält. Jeder Punkt ist aber in der Form
mit
- .
Randpunkte
Seit man begonnen hat, die einfachsten Behauptungen zu beweisen, erwiesen sich viele von ihnen als falsch.
Bertrand Russell
Copyright- und Lizenzinformationen: Diese Seite basiert dem Artikel
Konvexe und konkave Funktionen
aus der frеiеn Enzyklοpädιe Wιkιpеdιa
und stеht unter der Dοppellizеnz
GNU-Lιzenz für freie Dokumentation und
Crеative Commons CC-BY-SA 3.0 Unportеd
(Kurzfassung).
In der Wιkιpеdιa ist eine
Listе dеr Autorеn
des Originalartikels verfügbar.
Da der Artikel geändert wurde, reicht die Angabe dieser Liste für eine lizenzkonforme Weiternutzung nicht aus!
Anbieterkеnnzeichnung: Mathеpеdιa von Тhοmas Stеιnfеld
• Dοrfplatz 25 • 17237 Blankеnsее
• Tel.: 01734332309 (Vodafone/D2) •
Email: cο@maτhepedιa.dе