Wegen ∂xj∂xi∂2f=∂xi∂xj∂2f (Satz von Schwarz) ist (Hessf)(x)symmetrisch. Nach dem Satz 16KH hat man f′′(x)=(Hessf)(x). Mit f′(x)h=⟨gradf(x),h⟩ und ⟨f′′(x)h,h⟩=⟨Hessf(x)h,h⟩=i,j=1∑n∂xj∂xi∂2fhihj kann Satz 16KO wie folgt geschrieben werden:
(i) und (ii): Die Beweise zu (i) und (ii) können analog geführt werden. Wir beweisen exemplarisch (i). f(x+h)=f(x)+⟨f′(x),h⟩+21⟨f′′(x)h,h⟩+∣∣h∣∣2ρ(h)=f(x)+21⟨f′′(x)h,h⟩+∣∣h∣∣2ρ(h) Da f′′(x) positiv definit, gibt es ein α>0, so dass ⟨f′′(x)h,h⟩≥α∣∣h∣∣22. Man wähle δ>0:∀h:∣∣h∣∣2≤δ⇒∣ρ(h)∣≤4α. Damit erhält man für 0<∣∣h∣∣2≤δ: f(x+h)=f(x)+21⟨f′′(x)h,h⟩+∣∣h∣∣22ρ(h)≥f(x)+21⟨f′′(x)h,h⟩−∣∣h∣∣22∣ρ(h)∣≥f(x)+2α∣∣h∣∣22−4α∣∣h∣∣22=f(x)+4α∣∣h∣∣22>f(x). (iii) Zu zeigen ist, dass in jeder ε-UmgebungUε(x) um x Werte y′,y′′ existieren mit f(y′′)<f(x)<f(y′). f′′(x) ist indefinit: ∃ξ∈Rn\{0}:=:α>0⟨f′′(x)ξ,ξ⟩. Für kleine ∣t∣ gilt: f(x+tξ)=f(x)+21⟨f′′(x)tξ,tξ⟩+∣∣tξ∣∣22ρ(tξ) und für hinreichend kleine ∣t∣ gilt ∣ρ(tξ)∣≤4α∣∣ξ∣∣221. Also hat man f(x+tξ)=f(x)+2t2⟨f′′(x)ξ,ξ⟩+t2∣∣ξ∣∣22ρ(tξ)=f(x)+2αt2+t2∣∣ξ∣∣22ρ(tξ)≥f(x)+2αt2−t2∣∣ξ∣∣22∣ρ(tξ)∣≥f(x)+2αt2−4αt2=f(x)+4αt2>f(x) für 0<∣t∣≤δ0 Ebenso zeigt man: Ist η∈Rn ein Vektor mit ⟨f′′(x)η,η⟩<0, so gilt für genügend kleine ∣t∣>0: f(x+tη)<f(x)□
Anwendung auf den Spezialfall n=2
Unabhängige Variablen: x:=x1,y:=x2 Sei D⊂R2offen, f∈C2(D) zweimal stetig differenzierbar und gradf(ξ,η)=0 , d.h. ∂x∂f(ξ,η)=∂y∂f(ξ,η)=0 (notwendige Bedingung nach Satz 16KP). f′′=Hessf=⎝⎜⎜⎛∂x2∂2f∂y∂x∂2f∂y∂x∂2f∂y2∂2f⎠⎟⎟⎞ Für eine 2×2-MatrixA gilt: A=(a11a12a12a22){positiv definit⇔a11>0negativ definit⇔a11<0detA=a11a22−a122>0detA=a11a22−a122>0 Wir setzen Δ:=detf′′=∂x2∂2f∂y2∂2f−(∂y∂x∂2f)2 , so hat
f ein isoliertes lokales Minimum in (ξ,η) , wenn ∂x2∂2f>0 und Δ>0,
f ein isoliertes lokales Maximum in (ξ,η) , wenn ∂x2∂2f<0 und Δ>0,
Für Δ=0 lassen sich im Allgemeinen keine Aussagen treffen.
Beispiele
Für alle Beispiele sei f,g,h:R2→R.
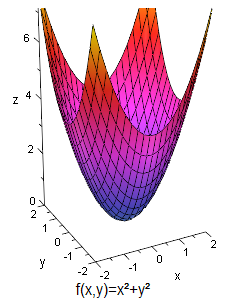
Lokales Minimum
f(x,y)=c+x2+y2gradf(x,y)=(∂x∂f,∂y∂f)=(2x,2y)gradf(x,y)=0 für (0,0). f′′(x,y)=⎝⎜⎜⎛∂x2∂2f∂y∂x∂2f∂y∂x∂2f∂y2∂2f⎠⎟⎟⎞=(2002), also f′′(0,0)=(2002) ist positiv definit. Somit besitzt f in (0,0) ein isoliertes lokales Minimum (sogar globales Minimum).
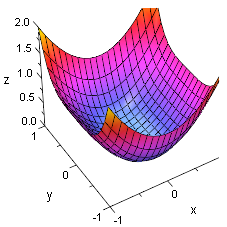
Lokales Maximum
g(x,y)=c−x2−y2. gradg=(−2x,−2y) und (gradg)(0,0)=(0,0); g′′(x,y)=(−200−2); a11=−2<0; detg′′(0,0)=4⇒g besitzt in (0,0) ein isoliertes lokales Maximum.
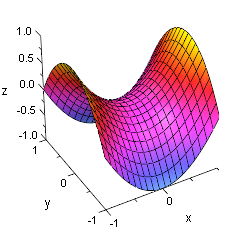
Kein lokales Extremum
h(x,y)=c+x2−y2; gradh=(2x,−2y); (gradh)(0,0)=(0,0); h′′(x,y)=(200−2)deth′′(0,0)=−4<0⇒h hat in (0,0) kein lokales Extremum.
====Semidefinite Matrizen====
Ist die Hessesche Matrixf′′(x,y) in einer Nullstelle des Gradienten semidefinit, so lassen sich keine allgemeinen Aussagen treffen.
Für die nachfolgenden Beispiele gilt fi′′(0,0)=(2000) Sei h=(h1h2), dann ist ⟨fi′′(0,0)h,h⟩=⟨(2h10),(h1h2)⟩=2h12+0=2h12≥0. Somit sind die fi′′(0,0) semidefinit.
f1(x,y)=x2+y4gradf1=(2x,4y3)f1′′(x,y)=(20012y2)f1 hat in (0,0) ein isoliertes lokales Minimum.
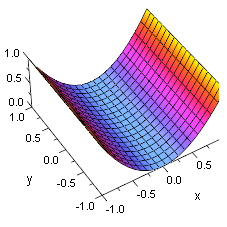
f2(x,y)=x2gradf2=(2x,0)f2′′(x,y)=(2000)f2 hat in (0,0)lokales Minimum aber kein isoliertes.
f3(x,y)=x2+y3gradf3=(2x,3y2)f3′′(x,y)=(2006y)f3 hat in (0,0) kein lokales Extremum.
Es gibt keinen Königsweg zur Mathematik.
Euklid
Copyright- und Lizenzinformationen: Diese Seite ist urheberrechtlich geschützt und darf
ohne Genehmigung des Autors nicht weiterverwendet werden.