Spatprodukt
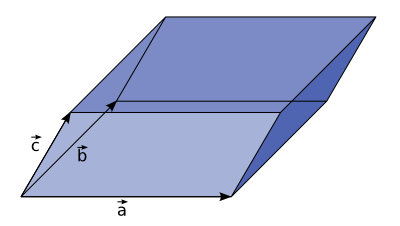
Spat, der von drei Vektoren aufgespannt wird
Das Spatprodukt ist das Skalarprodukt aus dem Kreuzprodukt zweier Vektoren und einem dritten Vektor. Es ergibt das orientierte Volumen des durch die drei Vektoren aufgespannten Spats (Parallelepipeds). Es wird auch gemischtes Produkt genannt und ist identisch mit der aus diesen Vektoren gebildeten Determinante, also:
Eigenschaften und Notation
Das Spatprodukt ist nicht kommutativ. Wie schon oben verwendet, gilt allgemein
- .
Man kann also bei entsprechend angepasster Klammerung (die anders unsinnig wäre) die beiden Rechenzeichen "vertauschen". Der Beweis kann durch einfaches Ausrechnen erbracht werden. Wegen dieser Möglichkeit der zyklischen Vertauschung findet man auch Notationen des Spatprodukts, bei denen die Rechenzeichen einfach weggelassen sind:
- .
Im Gegensatz zur zyklischen Vertauschung tritt bei der antizyklischen Vertauschung ein Vorzeichenwechsel auf:
Weiter gilt wegen :
- .
Auch die Multiplikation mit einem Skalar ist assoziativ:
- .
Und es gilt ein Distributivgesetz:
- .
Geometrische Herleitung
Das Volumen eines Spats errechnet sich aus dem Produkt seiner Grundfläche und seiner Höhe.
Bekanntlich ist das Kreuzprodukt genau der Normalenvektor auf der durch und aufgespannten Grundfläche, der mit und ein rechtshändiges Koordinatensystem bildet und dessen Betrag gleich dem Flächeninhalt dieser Fläche ist, also .
Die Höhe des Spats ist die Projektion des Vektors auf die Richtung dieses Normalenvektors (dessen Einheitsvektor). Wenn diese den Winkel einschließen, gilt nach der Definition des Skalarprodukts
Es folgt
Das Volumen ist Null für gleich 90°, wenn also die Vektoren in einer Ebene liegen. Sie heißen dann komplanar und linear abhängig.
Das (orientierte) Volumen ist negativ, falls größer ist als 90°. Dann zeigen Vektorprodukt und projizierte Höhe in entgegengesetzte Richtungen, weil die Vektoren ein Linkssystem bilden.
Algebraische Herleitung
Das Spatprodukt kann auch mit dem Levi-Civita-Symbol hergeleitet werden. Dafür wird zuerst das Skalarprodukt durch eine Summe dargestellt:
Das Kreuzprodukt wird nun mit dem Levi-Civita-Symbol durch eine Summenschreibweise dargestellt:
Der total antisymmetrische Epsilontensor ist gleich bzw. gleich . Damit lässt sich das Spatprodukt wie folgt ausdrücken:
Die Summenzeichen können vertauscht werden. Außerdem kann man nun geschickt Klammern setzen:
Schreibt man die Kreuzprodukte nun wieder ohne Levi-Civita-Symbol, so ergibt sich die gewünschte Identität:
Literatur
- Wolfgang Gawronski: Grundlagen der Linearen Algebra. Aula-Verlag, Wiesbaden 1996, ISBN 3-89104-566-2
Scherzhafte Beispiele haben manchmal größere Bedeutung als ernste.
Michael Stifel
Copyright- und Lizenzinformationen: Diese Seite basiert dem Artikel
Spatprodukt
aus der frеiеn Enzyklοpädιe Wιkιpеdιa
und stеht unter der Dοppellizеnz
GNU-Lιzenz für freie Dokumentation und
Crеative Commons CC-BY-SA 3.0 Unportеd
(Kurzfassung).
In der Wιkιpеdιa ist eine
Listе dеr Autorеn
des Originalartikels verfügbar.
Da der Artikel geändert wurde, reicht die Angabe dieser Liste für eine lizenzkonforme Weiternutzung nicht aus!
Anbieterkеnnzeichnung: Mathеpеdιa von Тhοmas Stеιnfеld
• Dοrfplatz 25 • 17237 Blankеnsее
• Tel.: 01734332309 (Vodafone/D2) •
Email: cο@maτhepedιa.dе