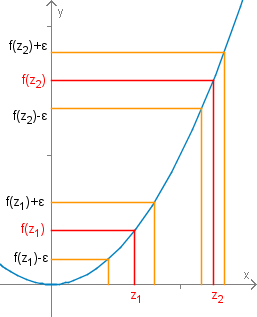
D=[0,∞[, f(x)=x2 und z>0. Sei ε>0 und sei δ>0 so gewählt, dass
∀x∈D∣x−z∣<δ⇒∣f(x)−f(z)∣<ε(1)
Während ε konstant bleibt, kann δ für z1 größer gewählt werden als für z2
Wir setzen x:=z+2δ, dann gilt ∣x−z∣=2δ<δ, daher auch ∣f(x)−f(z)∣<ε d.h. ∣∣x2−z2∣∣<ε, also wegen x2−z2=(x−z)(x+z): =2δ(2z+2δ)∣x−z∣⋅∣x+z∣<ε⇒2δ⋅(2z+2δ)=δz+4δ2>δz⇒δz<ε⇒δ<zε⇒δ hängt von ε und von z ab. Je größer z wird, desto kleiner muss δ werden, um die Gültigkeit von (1) zu gewährleisten. Die Anpassung des Stetigkeitskriteriums führt auf die gleichmäßige Stetigkeit.
Definition der gleichmäßigen Stetigkeit
f:D→R heißt gleichmäßig stetig auf D, wenn gilt:
∀ε>0∃δ>0∀x,z∈D:∣x−z∣<δ⇒∣f(x)−f(z)∣<ε
In dieser Definition hängt δ nur von ε ab. Die gleichmäßige Stetigkeit kann jedoch nicht mehr für einzelne Punkte definiert werden. Nach Definition ist sofort klar: fgleichmäßig stetig auf D⇒fstetig auf D. Die Umkehrung gilt jedoch im Allgemeinen nicht. Es gilt aber
f=x2 und D=[0,1]. ∣f(x)−f(z)∣=∣x2−z2∣=∣x+z∣⋅∣x−z∣≤2∣x−z∣. Für ε>0 wählen wir daher δ:=2ε und sehen, dass f auf [0,1]gleichmäßig stetig ist.
Beispiel
f=x1 und D=]0,1]. f ist nicht gleichmäßig stetig auf D.
Für ϵ=1 zeigen wir, dass es für beliebiges δ>0x,z∈]0,1] gibt, so dass ∣x−z∣<δ und ∣∣∣∣x1−z1∣∣∣∣>=1. 1. Fall δ>=1: Die Behauptung ist mit x=1 und z=31 erfüllt, da ∣x−z∣=∣∣∣∣1−31∣∣∣∣=32<δ, aber ∣∣∣∣x1−z1∣∣∣∣=∣1−3∣=2>=1. 2. Fall δ<1: Setze x=δ und z=2δ. Es gilt ∣x−z∣=∣∣∣∣δ−2δ∣∣∣∣=−2δ<δ, aber ∣∣∣∣x1−z1∣∣∣∣=∣∣∣∣δ1−δ2∣∣∣∣=∣∣∣∣−δ1∣∣∣∣>1, da δ<1.
"Offensichtlich" ist das gefährlichste Wort in der Mathematik.
Eric Temple Bell
Copyright- und Lizenzinformationen: Diese Seite ist urheberrechtlich geschützt und darf
ohne Genehmigung des Autors nicht weiterverwendet werden.