Affine Koordinatenebenen
Sei
K ein beliebiger Körper und
V=(K2,K) der kanonische zweidimensionale
Vektorraum über
K. Die
Punkte seien die Elemente aus
K2 und die
Geraden Teilmengen der Form
g(a,b)={a+tb∣a,b∈K2,t∈K,b=/0}.
(1)
Nach dieser Definition gilt
a∈g(a,b) (für
t=0) und
a+b∈g(a,b) (für
t=1). Eine Struktur mit
Punkten aus
K2 und
Geraden der Form
(1) heißt
Koordinatenebene.
Im weiteren werden wir jedoch eine Darstellung für
Geraden bevorzugen, die an die Hessesche
[1] Normalform angelehnt ist. Dazu definieren wir zuerst einen Normalenvektor.
Normalenvektoren
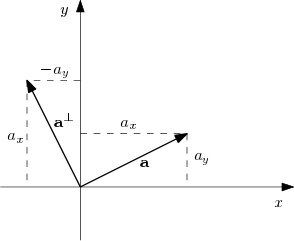
Veranschaulichung des Normalenvektors
Im zweidimensionalen
Vektorraum V=(K2,K) definieren wir zu einem Vektor
a=(axay) den Normalenvektor
a⊥=(−ayax). Anschaulich entspricht dies im
R2 einer
Drehung um den Ursprung um
90° entgegen dem Uhrzeigersinn (vgl. Abb. ). Die Ursprungsgeraden durch
a und
a⊥ stehen senkrecht aufeinander. Das gewählte Symbol
⊥ soll dies andeuten.
Gleichwertige Resultate würden wir erzielen, hätten wir
(ay−ax) als Normalenvektor gewählt. Wir haben uns jedoch für diese Definition entschieden, da sie einer
Drehung in mathematisch positiven Drehsinn entspricht.
Satz UB20 (Eigenschaften der Normalenvektoren)
Seien
a,bc∈K2 und
α,β,λ∈K. Dann gilt:
- ⊥:K2→K2 ist eine lineare Abbildung, also (αa+βb)⊥=αa⊥+βb⊥
- a⊥⊥=−a
- ⟨a⊥,b⟩=−⟨a,b⊥⟩, speziell ⟨a⊥,a⟩=⟨a,a⊥⟩=0
- ⟨a,b⊥⟩=0} gdw. es gibt ein 0=/λ∈K mit b=λa, falls a,b=/0
- ⟨a,b⊥⟩c+⟨b,c⊥⟩a+⟨c,a⊥⟩b=0
[!Punkt] (v) ist eine andere Formulierung für: je drei Vektoren sind
linear abhängig. Wir können also mit Hilfe von Normalenvektoren auf einfache Weise eine
Linearkombination für drei Vektoren ausdrücken.
Beweis
Der Beweis von (i) - (iii) und (v) ist durch einfaches Einsetzen der Definition und Ausrechnen zu führen und sei dem Leser überlassen.
(iv) Sei
⟨a,b⊥⟩=0, dann gilt nach Definition
axby=aybx. Wir müssen zeigen, dass ein
λ=/0 existiert mit
bx=λax und
by=λay. Im Fall
ax=0 gilt
0=aybx und da wegen
a=/0 nun
ay=/0 gilt, ist
bx=0. Da
by=/0 ist mit
λ=ayby die Behauptung erfüllt. Im Fall
ax=/0 gilt
by=axbxay und wir wählen
λ=axbx und Behauptung ist erfüllt, da notwendigerweise
bx=/0.
Nun gelte
b=λa mit
λ=/0, also
⟨a,b⊥⟩=⟨a,(λa)⊥⟩=λ⟨a,a⊥⟩=0, wobei wir (iii) benutzt haben.
□ Wir führen nun eine weitere Geradendefinition ein. Für
a,b∈K2 wobei
b=/0 sei die
Gerade g^(a,b) definiert durch
g^(a,b)={x∈K2∣⟨x,b⊥⟩=⟨a,b⊥⟩}
Es gilt also für
x∈K2:x∈g^(a,b)⟺⟨x,b⊥⟩=⟨a,b⊥⟩⟺⟨x−a,b⊥⟩=0.
Da die rechte Seite eine Zahl aus
K ist, handelt es sich bei dieser Definition faktisch um die Hessesche Normalform einer
Geraden. Der Vorteil dieser Geradendefinition gegenüber der von
(1) ist, dass sie ohne einen Parameter
t auskommt und nur mit den Vektoren aus
K2, dem
Skalarprodukt und dem Normalenvektor formuliert werden kann. Beide Definitionen sind jedoch gleichwertig.
Satz IU75
Sei
g^(a,b) eine
Gerade. Dann gilt
g^(a,b)={a+λb∣λ∈K}. Speziell
a∈g^(a,b) für
λ=0 und
a+b∈g^(a,b) für
λ=1. Damit ist
g^(a,b)=
g(a,b).
Beweis
Es gilt offensichtlich
a∈g(a,b) und
a∈g^(a,b). Sei nun
x=/a. dann ergibt sich mit
Satz UB20 (iv):
x=a+tb für ein
t=/0 ⟺x−a=tb ⟺⟨x−a,b⊥⟩=⟨tb,b⊥⟩=0 ⟺⟨x,b⊥⟩=⟨a,b⊥⟩ ⟺x∈g^(a,b).
□ Da nun
g(a,b)=g^(a,b) gilt und keine Verwechslungen zu befürchten sind, schreiben wir nun stets
g für
g^.
Satz HT65
Jede Koordinatenebene ist eine
Inzidenzebene. Dabei sind die
Punkte die Elemente aus
K2 und die
Geraden alle
g(a,b)={x∈K2∣⟨x,b⊥⟩=⟨a,b⊥⟩} für
a,b∈K2 mit
b=/0.
Beweis
Inz1: Seien
a,b∈K2 , wir zeigen, dass
g(a,b−a) die von
a und
b eindeutig bestimmte
Gerade ist. Nach Definition handelt es sich um eine
Gerade. Nach
Satz IU75 gilt
a,b∈g(a,b−a). Bleibt nachzuweisen, dass
g(a,b−a) eindeutig bestimmt ist. Angenommen
g(c,d) ist eine andere
Gerade, die sowohl
a als auch
b enthält. Dann gilt zunächst
⟨a,d⊥⟩=⟨b,d⊥⟩=⟨c,d⊥⟩ und damit
⟨b−a,d⊥⟩=0 und nach
Satz UB20 gibt es ein
λ=/0, sodass
b−a=λd. Sei nun
x∈K2 ein beliebiger
Punkt auf der
Geraden g(a,b−a). Dann gilt folgende Äquivalenzkette:
x∈g(a,b−a) ⟺⟨x−a,(b−a)⊥⟩=0 ⟺⟨x−a,(λd)⊥⟩=0 ⟺⟨x−a,d⊥⟩=0 ⟺⟨x,d⊥⟩=⟨a,d⊥⟩=⟨c,d⊥⟩ ⟺x∈g(c,d). Daher gilt
x∈g(a,b−a)=g(c,d) und die die von
a und
b bestimmte
Gerade ist eindeutig, womit
Inz1 nachgewiesen wäre.
Inz2 ist trivial erfüllt und wir haben in
Satz IU75 auch schon die zwei
Punkte angegeben, die stets auf einer
Geraden g(a,b) liegen:
a und
a+b.
Inz3: Sei nun
a=(0,0)⊤,
b=(0,1)⊤ und
c=(1,0)⊤. Dann sind diese drei
Punkte verschieden, da in jedem Körper
0=/1 gilt. Wir zeigen dass sie auch nicht
kollinear sind. Angenommen
c∈g(a,b−a), dann gilt nach
Satz IU75 für ein
λ∈K:
(1,0)⊤=(0,0)⊤+λ(0,1)⊤=t(0,1)⊤, also
1=λ⋅0, was für kein
λ∈K erfüllt ist. Damit ist die Annahme, dass
c auf der
Geraden durch
a und
b liegt, widerlegt.
□
Es gibt jedoch noch einen anderen Grund für die hohe Wertschätzung der Mathematik; sie allein bietet den Naturwissenschaften ein gewisses Maß an Sicherheit, das ohne Mathematik nicht erreichbar wäre.
Albert Einstein
Copyright- und Lizenzinformationen: Diese Seite ist urheberrechtlich geschützt und darf
ohne Genehmigung des Autors nicht weiterverwendet werden.
Anbieterkеnnzeichnung: Mathеpеdιa von Тhοmas Stеιnfеld
• Dοrfplatz 25 • 17237 Blankеnsее
• Tel.: 01734332309 (Vodafone/D2) •
Email: cο@maτhepedιa.dе