Polarkoordinaten
Die Polarkoordinaten (auch: Kreiskoordinaten) eines Punktes in der euklidischen Ebene werden in Bezug auf einen Koordinatenursprung (einen Punkt der Ebene) und eine Richtung (einen im Koordinatenursprung beginnenden Strahl) angegeben.
Die Koordinate r, eine Länge, wird als Radius, die Winkelkoordinate als Azimut bezeichnet.
Für die Funktionaldeterminante in ebenen Polarkoordinaten erhält man
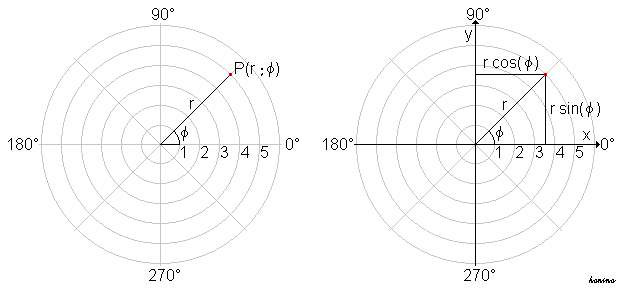
Umrechnung zwischen Polarkoordinaten und kartesischen Koordinaten
Wenn man ein kartesisches Koordinatensystem mit gleichem Ursprung sowie der -Achse in Polarkoordinatenrichtung wählt, ergibt sich
als Transformation zu kartesischen Koordinaten.
Polar zu kartesisch lässt sich demnach folgendermaßen umrechnen:
Für kartesisch zu polar gelten die folgenden Formeln:
Letztere Formel stimmt allerdings nur im ersten Quadranten, genauer für x>0,y>0. Im Fall x<0 ist , und für x>0,y<0 sogar zu diesem Winkel zu addieren.
Das Linienelement
Aus der obigen Transformationsgleichung
folgen
Für das kartesische Linienelement gilt
wofür in Polarkoordinaten folgt
Geschwindigkeit und Beschleunigung in Polarkoordinaten
Die Geschwindigkeit ist gegeben durch
Die Beschleunigung ist gegeben durch
Es gibt Dinge, die den meisten Menschen unglaublich erscheinen, die nicht Mathematik studiert haben.
Archimedes
Copyright- und Lizenzinformationen: Diese Seite basiert dem Artikel
Polarkoordinaten
aus der frеiеn Enzyklοpädιe Wιkιpеdιa
und stеht unter der Dοppellizеnz
GNU-Lιzenz für freie Dokumentation und
Crеative Commons CC-BY-SA 3.0 Unportеd
(Kurzfassung).
In der Wιkιpеdιa ist eine
Listе dеr Autorеn
des Originalartikels verfügbar.
Da der Artikel geändert wurde, reicht die Angabe dieser Liste für eine lizenzkonforme Weiternutzung nicht aus!
Anbieterkеnnzeichnung: Mathеpеdιa von Тhοmas Stеιnfеld
• Dοrfplatz 25 • 17237 Blankеnsее
• Tel.: 01734332309 (Vodafone/D2) •
Email: cο@maτhepedιa.dе