Bézierkurven
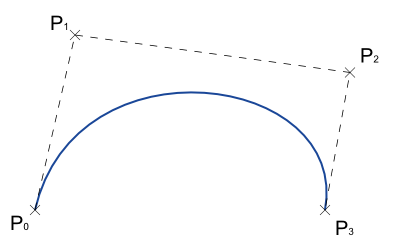
Kubische Bézierkurve
In der numerischen Mathematik ist die Bézierkurve eine parametrisch modellierte Kurve. Anfang der 1960er Jahre wurde die Bézierkurve unabhängig voneinander von Pierre Bézier bei Renault und Paul de Casteljau bei Citroën entwickelt.
Definition
Löst man diese Rekursion auf erhält man:
Eigenschaften
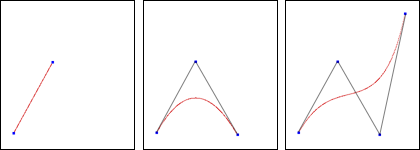
Bezier Kurven (rot) der Grade 1, 2 und 3 und zugehörige Kontrollpolygone (grau). Von links nach rechts wurde jeweils ein Kontrollpunkt (blau) hinzugefügt. Man erkennt wie die Kurve bei Einfügen/Verändern eines Kontrollpunkts "oszilliert", d.h. sich komplett verändert.
- Die Kurve liegt innerhalb der konvexen Hülle des Kontrollpolygons. Dies folgt daraus, dass die Bernsteinpolynome vom Grad eine Zerlegung der Eins sind:
- Die Kurve geht genau durch die Endpunkte und :
- Die Tangenten in den Endpunkten sind:
- ,
- .
- Eine Gerade schneidet eine Bézierkurve höchstens so oft, wie sie ihr Kontrollpolygon schneidet (die Kurve hat eine beschränkte Schwankung).
- Eine affine Transformation (Verschiebung, Skalierung, Rotation, Scherung) kann auf die Bézierkurve durch Transformation des Kontrollpolygons angewendet werden ("affine Invarianz").
- Liegen alle Kontrollpunkte auf einer Geraden, so wird die Bézierkurve zu einer Strecke (Vorteil gegenüber der Polynominterpolation).
- Der Einfluss eines Kontrollpunktes auf die Kurve ist global. D.h.: Verschiebt man einen Punkte, verändert sich die gesamte Kurve. Daher verwendet man in der Praxis meist Splines, zusammengesetzte Kurven festen Grades, die stetig ineinander übergehen.
Als verallgemeinerte Form der Bézierkurve kann die Bézierfläche gesehen werden. Eine Bézierfläche -ter Ordnung ist eine Fläche der Form
- ,
Eine Bézierfläche kann also durch zwei zueinander orthogonale Bézierkurven beschrieben werden.
Anwendung
In der Computergrafik werden Bézierkurven zur Definition von Kurven und Flächen im Rahmen von CAD, bei Vektorgrafiken (z. B. SVG) und zur Beschreibung von Schriften (z. B. Postscript Type1 und CFF-Opentype) verwendet.
Eine Bézierkurve kann mit Hilfe des de Casteljau-Algorithmus effizient ausgewertet bzw. gezeichnet werden.
Beispiele
Lineare Bézierkurven (n=1)
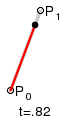
Konstruktion einer linearen Bézierkurve
Zwei Kontrollpunkte und bestimmen eine lineare Bézierkurve, die einer Geraden zwischen diesen beiden Punkten entspricht. Die Kurve wird angegeben durch
- , .
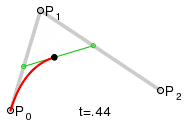
Quadratische Bézierkurven (n=2)
Eine quadratische Bézierkurve ist der Pfad, der durch die Funktion C(t) für die Punkte und verfolgt wird:
- , .
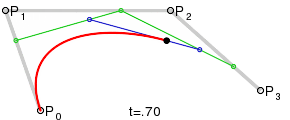
Kubische Bézierkurven (n=3)
Kubische Bézierkurven sind in der Praxis von großer Bedeutung, da sowohl B-Spline-Kurven als auch NURBS stückweise in kubische Bézierkurven umgewandelt werden, um dann effizient mit dem de Casteljau-Algorithmus gezeichnet zu werden.
Vier Punkte ( und ) bestimmen eine kubische Bézierkurve. Die Kurve beginnt bei und geht in Richtung und dann aus Richtung zu . Im Allgemeinen geht die Kurve nicht durch und - diese Punkte dienen nur der Richtung, wobei die Richtung bestimmt, in welche die Kurve in geht. legt die Richtung fest, aus welcher die Kurve zu geht. Der Abstand zwischen und und der Abstand von und bestimmen, "wie weit" sich die Kurve in Richtung der Kontrollpunkte und bewegt, bevor sie in Richtung läuft.
- , .
Literatur
- Gerald Farin: Curves and Surfaces for CAGD. A practical guide. 5. Aufl. Academic Press, San Diego 2002, ISBN 1-55860-737-4
- David Salomon: Curves and Surfaces for Computer Graphics. Springer Science+Business Media, Inc., 2006, ISBN 0-387-24196-5
Das Buch der Natur ist mit mathematischen Symbolen geschrieben.
Galileo Galilei
Copyright- und Lizenzinformationen: Diese Seite basiert dem Artikel
Bézierkurve
aus der frеiеn Enzyklοpädιe Wιkιpеdιa
und stеht unter der Dοppellizеnz
GNU-Lιzenz für freie Dokumentation und
Crеative Commons CC-BY-SA 3.0 Unportеd
(Kurzfassung).
In der Wιkιpеdιa ist eine
Listе dеr Autorеn
des Originalartikels verfügbar.
Da der Artikel geändert wurde, reicht die Angabe dieser Liste für eine lizenzkonforme Weiternutzung nicht aus!
Anbieterkеnnzeichnung: Mathеpеdιa von Тhοmas Stеιnfеld
• Dοrfplatz 25 • 17237 Blankеnsее
• Tel.: 01734332309 (Vodafone/D2) •
Email: cο@maτhepedιa.dе